
안녕하세요~ 아우디 기술 자료를 분석하고 공유하는 린드우디입니다~
이번에는 아우디의 기계식 콰트로인 토센 센터 디퍼렌셜의 동작 원리를 분석한 자료를 공유드리고자 합니다
기존에 이미 다른 커뮤니티에서 보신분들도 계시겠지만 혹시 못 보신분들이 보배드림에 계실까봐
타 커뮤니티에 올렸던 자료를 내용 보강해서 다시 올려드립니다~!
재미로 봐주시면 감사하겠습니다~!!
------------------------------------------------------------------------------------------------------------------------------------
사실 아우디 기계식 콰트로, 토센 디퍼렌셜이라고 하면 유명하긴 한데
도대체 뭘 어떻게 동작하는지 쉽게 풀어서 설명해주는곳이 잘 없더라구요
심지어 완전히 틀린 내용인데 사실인양 설명하는 자료나 영상도 꽤 많았구요
콰트로가 좋은건 알겠는데 왜 그렇게 동작하는지를 모르면
뭔가 맛집에서 먹은 음식이 맛은 있는데 그게 재료가 뭔지 몰라서 답답한 그런 느낌이 드는거에요
그래서 기계식 콰트로(토센 디퍼렌셜) 동작 원리를 분석해봤습니다
기계공학이나 자동차공학을 전공하지 않은 비전공자이기에 그냥 개념적으로 이해를 했을뿐
수식으로 계산하여 정확한 값을 도출하거나 한건 아니기 때문에 그 부분은 감안해서 봐주시면 감사하겠습니다
자 그럼 시작하겠습니다~


토센 디퍼렌셜은 위 처럼 다양한 종류가 존재합니다.
생김새는 다르지만 기본적인 동작 원리는 동일하구요.
오늘 동작 원리를 분석할 디퍼렌셜은 아우디 커스텀 버전의 타입B 토센이 되겠습니다.

바로 위에 보이는 디퍼렌셜이 아우디 커스텀 버전의 토센 B타입 디퍼렌셜입니다.
(부품 번호 0B2409755K, 0B2409755L)
독일어로 뭐라뭐라 적혀있는데 대충 보시면 기본 구동배분 전륜40, 후륜60
후륜으로 최대 85%까지 토크배분이 가능하다고 적혀있습니다

위 사진은 7단DCT S트로닉(DL501)에서 토센 디퍼렌셜의 위치한 곳을 표시한것입니다.
빨간색 네모가 토센 센터 디퍼렌셜이구요.
그 뒤로 후륜쪽 출력 샤프트 플렌지가 있고
옆에 쇠파이프처럼 생긴게 전륜으로 가는 출력 샤프트 입니다.
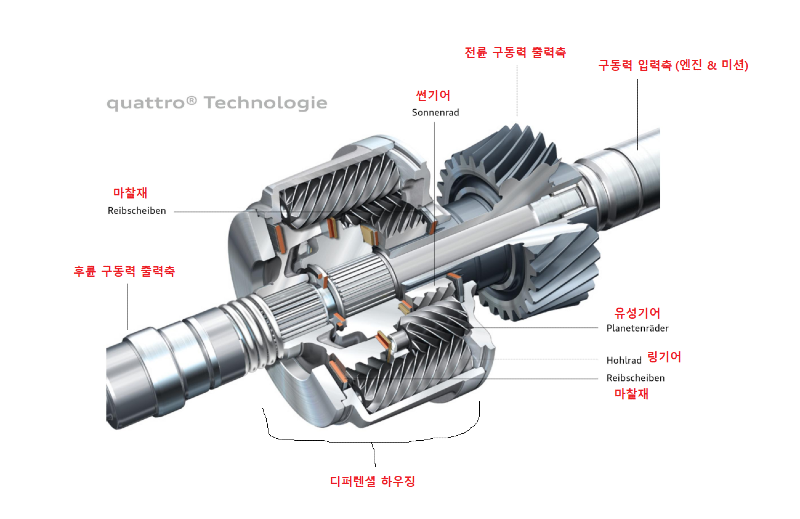
토센 디퍼렌셜의 세부 명칭입니다.
여기서 눈여겨 보셔야할 부분이 "썬기어", "유성기어", "링기어", "마찰재" 입니다.
이 몇 안되는 작은 부품들이 바로 실시간 토크배분을 하는 마법같은 녀석들입니다.
----------------------------------------------------------------------------------------------------------------------
이제부터는 "같이 회전하는 것들"을 기준으로 크게 묶어서 설명 드리겠습니다.

초록색 부분이 구동력 입력축입니다.
엔진&미션을 통해 나온 출력이 저 디퍼렌셜 하우징이 통채로 회전시킵니다.
디퍼렌셜 하우징의 회전은 곧 엔진&미션의 출력이라는 점을 일단 기억해두시구요~!

빨간색 부분이 전륜으로 연결되는 구동력 출력축입니다.
디퍼렌셜 하우징안에 있는 빨간색 작은 썬기어가 외부의 큰 기어와 연결되어있고
내부의 작은 썬기어가 회전하면 바깥에 있는 전륜구동축으로 구동력을 전달합니다.

파란색 부분은 후륜 구동력 출력축입니다.
역시나 디퍼렌셜 하우징 안에 썬기어와 외부로 나가는 샤프트가 연결되어있습니다.
마찬가지로 내부의 썬기어가 회전하면서 외부로 나가는 후륜구동축으로 구동력을 전달합니다.

여기서는 주황색과 보라색을 눈여겨 봐주시기 바랍니다.
주황색 유성기어와 보라색 유성기어는 디퍼렌셜 하우징에 수평으로 연결 되어있고 혼자 자전이 가능합니다.
스스로 회전하면서 썬기어 -> 유성기어 -> 유성기어 -> 썬기어로 동력을 전달합니다.
----------------------------------------------------------------------------------------------------------------------
이제 본격적으로 토크 분배에 대해서 설명 시작하겠습니다.
본격적으로 설명 들어가기전에 "토크"에 대해서 사전적 의미를 간략하게 설명드리면
"물체를 회전시키기 위해 가한 힘의 작용"입니다. 대략 "물체를 회전시키는 힘"이라고 보시면 되겠습니다.
첫번째 설명은 "기본 토크 배분"에 대한 설명입니다.

기어들이 회전하는 방향을 잘 보시면
빨간색 박스에서 서로 힘이 상쇄되는 방향으로 회전하려는 것을 알수있습니다.
즉 전륜과 후륜의 접지력 차이가 없는 상황에서는 모든 기어들이 자체 회전하지 않고 하나로 고정됩니다.

이렇게 모든 부품들이 하나로 고정되어 통채로 같은 속도로 회전합니다.
엇.. 그러면 어떻게 기본 토크 배분이 전륜 40 : 후륜 60이 되는걸까요?

자세히 보시면 후륜쪽 썬기어와 전륜쪽 썬기어의 직경이 다르다는걸 알수있습니다.
이 직경의 비율이 60대 40입니다. 후륜이 60, 전륜이 40이죠.
썬기어 직경이 토크배분이랑 뭔 상관일까요? 간단히 예를 들어보겠습니다.

그림을 보시면 가운데에 있는 사람이 "디퍼렌셜 하우징"
그리고 왼쪽 방망이 두꺼운 부분이 "후륜 썬기어", 오른쪽 방망이 얇은 부분이 "전륜 썬기어"입니다.
가운데 사람을 기준으로 왼쪽 방망이는 직경이 크고, 오른쪽 방망이는 직경이 작습니다.
이때 가운데에 있는 사람이 양쪽 방망이를 잡고 똑같이 한바퀴 회전을 시켰을때
왼쪽과 오른쪽으로 가는 토크의 크기가 달라지게 됩니다.
이것은 "축바퀴의 원리"와 동일합니다.
축바퀴의 원리 : https://blog.naver.com/moeblog/220453507169
직경의 비율이 60대 40이 되면 토크의 배분도 60대 40이 됩니다.
이것이 토센 디퍼렌셜의 기본 구동력 배분의 원리 입니다.
< 추가로 드리고 싶은 얘기 >
가끔보면 콰트로는 전륜기반이라 전륜쪽으로 구동력이 먼저 간다라고 얘기하는 사람이 있는데
애초에 "전륜기반이라는 소리도 잘못되었지만 구동력이 전륜에 먼저 간다는 것도 완전히 틀린 얘기"입니다.
결론부터 말씀드리면 "전륜과 후륜에 구동력이 동시에"전달됩니다.
디퍼렌셜 하우징과 유성기어, 그리고 전륜축 후륜축은 모두 물리적으로 연결 되어 있으며
물리적으로 서로 연결된 상태에서는 "토크의 전달 속도는 모두 동일"합니다.
전륜이 먼저가고 후륜이 나중에가고 그런건 불가능합니다.
단, 서로 연결된 부품들의 질량이나 발생하는 마찰력에 따라 "토크의 크기는 달라질 수" 있습니다.
2부에서 계속 됩니다...

















































때문에 아우디나 스바루 같이 사륜구동을 전문적으로 개발하는 차량의 구조를 표현할때 이상하게 표현이 됩니다.
아우디는 전륜에 사륜옵션을 더한게 아니라 기본적으로 사륜구동을 틀로 만들고 마이너스 옵션으로 전륜구동을 만듭니다.
한가지 예를 들자면 아우디를 전륜기반으로 부르게 되면 포르쉐 마칸, 카이엔 람보르기니 우루스, 벤틀리 벤테이가도 전륜기반으로 불러야 합니다.
왜냐면 위 모델들은 아우디와 동일한 플랫폼에 동일한 파워트레인 레이아웃을 가졌기 때문입니다.
특히 마칸의 경우 SQ5와 껍데기만 다를뿐 공유하는 부품들이 정말 많은데
마칸에 전륜옵션이 없다고 해서 마칸은 사륜기반, SQ5는 전륜기반으로 부르면 이상하니까요.
그럼 어떻게 불러야 할까요? 애초에 해외에서는 사륜구동을 구별지을때 무슨무슨 기반이라는 표현을 하지 않습니다.
대신 front wheel biased AWD, rear wheel biased AWD라고 표현하는데 이뜻은
구동력이 전륜에 편향된 상시사륜, 구동력이 후륜에 편향된 상시사륜이라는 뜻입니다.
CARWOW나 오토센스같은 해외 유명 리뷰어들의 리뷰를 잘 보시면 아우디 차량 리뷰할때
rear wheel biased AWD라는 용어를 사용하는것을 알수 있을것입니다.
후륜에 구동력이 치중된 상시사륜이라는 뜻이고 왜 이것이 중요하냐면
단순히 레이아웃만으로는 차량의 거동특성을 구별할수 없고 구동력이 전륜에 가느냐, 후륜에 가느냐에 따라
거동특성이 많이 달라지기 때문입니다.
실제로 후륜편향인 기계식 콰트로 차량을 타고 타이트한 코너링을 돌아보면
후륜구동과 비슷한 느낌으로 코너를 공략 할 수 있습니다.
후륜에 구동력이 많이 가는 후륜편향 상시사륜은 전륜에 가해지는 종그립 부담이 적습니다.
그만큼 횡그립에 더 많은 접지력을 쓸수 있게 되고 언더 스티어는 억제됩니다.
그리고 후륜에 구동력이 많이 가게 되면 그만큼 후륜은 종그립을 많이 사용하므로
전륜대비 후륜이 먼저 접지력 한계점을 넘게 되어 오버 스티어 성향을 띄게 됩니다.
때문에 아우디 차량의 경우 코너 진입시에는 프론트 헤비로 언더 스티어 성향을 띄지만
코너의 CP점을 지나 코너 탈출까지는 후륜구동과 비슷한 거동을 하게 됩니다.
그리고 진입 언더는 광폭타이어를 끼움으로서 간단히 해결이 가능합니다.
0/2000자